施工机器人模型制作软件怎么做?如何高效构建建筑工地智能设备数字孪生体?
随着建筑工业化和智能化的快速发展,施工机器人正从概念走向落地,成为提升效率、保障安全、降低成本的关键工具。然而,要真正发挥其价值,离不开高精度、高效率的施工机器人模型制作软件。这类软件不仅是设计和仿真平台,更是连接物理世界与数字世界的桥梁——它让工程师能够在虚拟环境中测试机器人的行为逻辑、运动轨迹和作业流程,从而优化部署方案,降低现场试错成本。
一、为什么需要专业的施工机器人模型制作软件?
传统建筑项目中,施工机械多依赖人工经验调度,存在效率低、安全隐患大、协同困难等问题。而施工机器人(如砌砖机器人、焊接机器人、巡检无人机等)则要求具备精确的空间定位能力、环境感知能力和自主决策能力。要实现这些功能,必须在开发阶段就通过高保真建模进行模拟验证。
专业的施工机器人模型制作软件可以:
- 加速研发周期:通过可视化建模快速迭代设计方案,减少物理原型制造次数;
- 提高安全性:在虚拟环境中预演危险工况,识别潜在风险点;
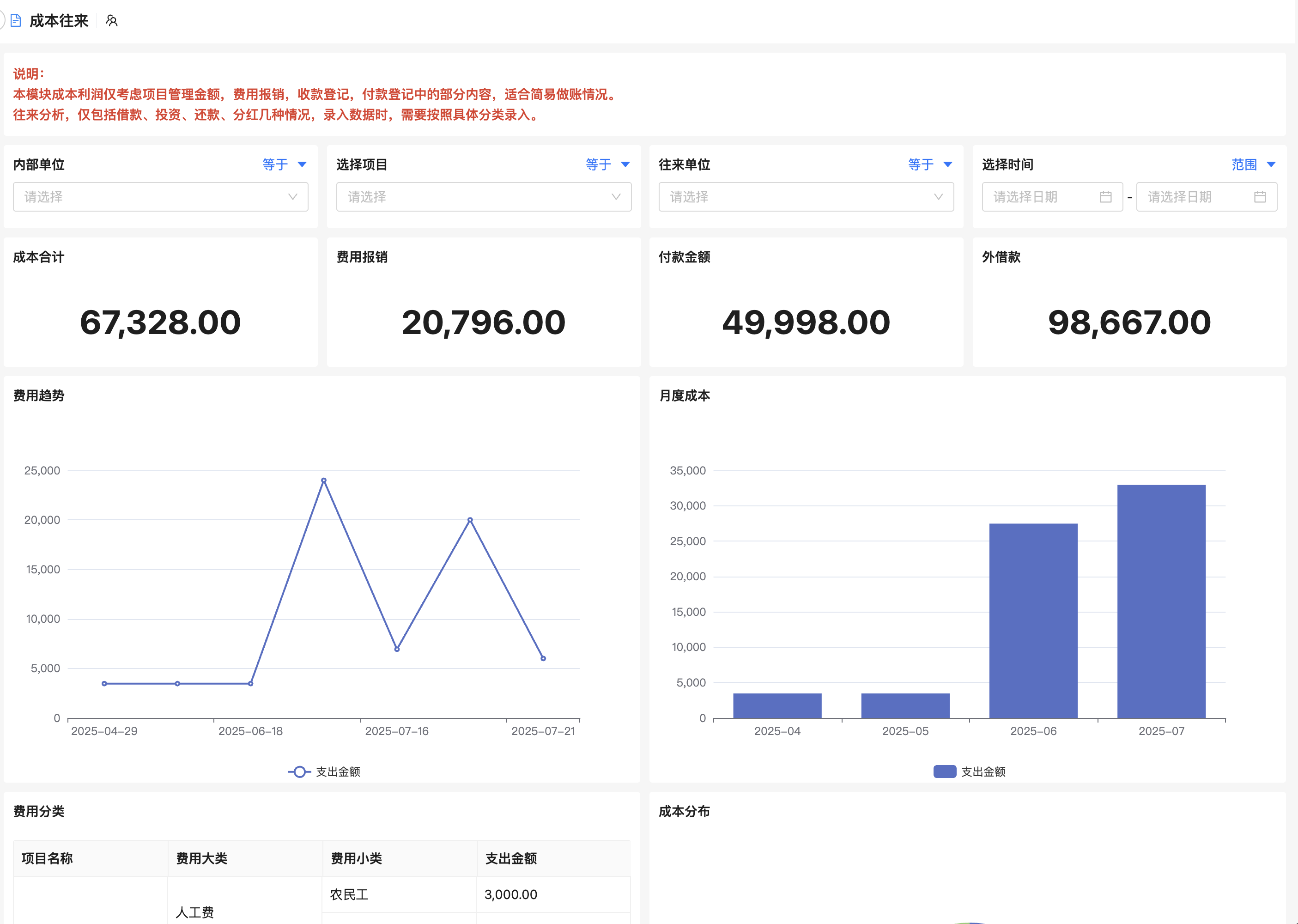
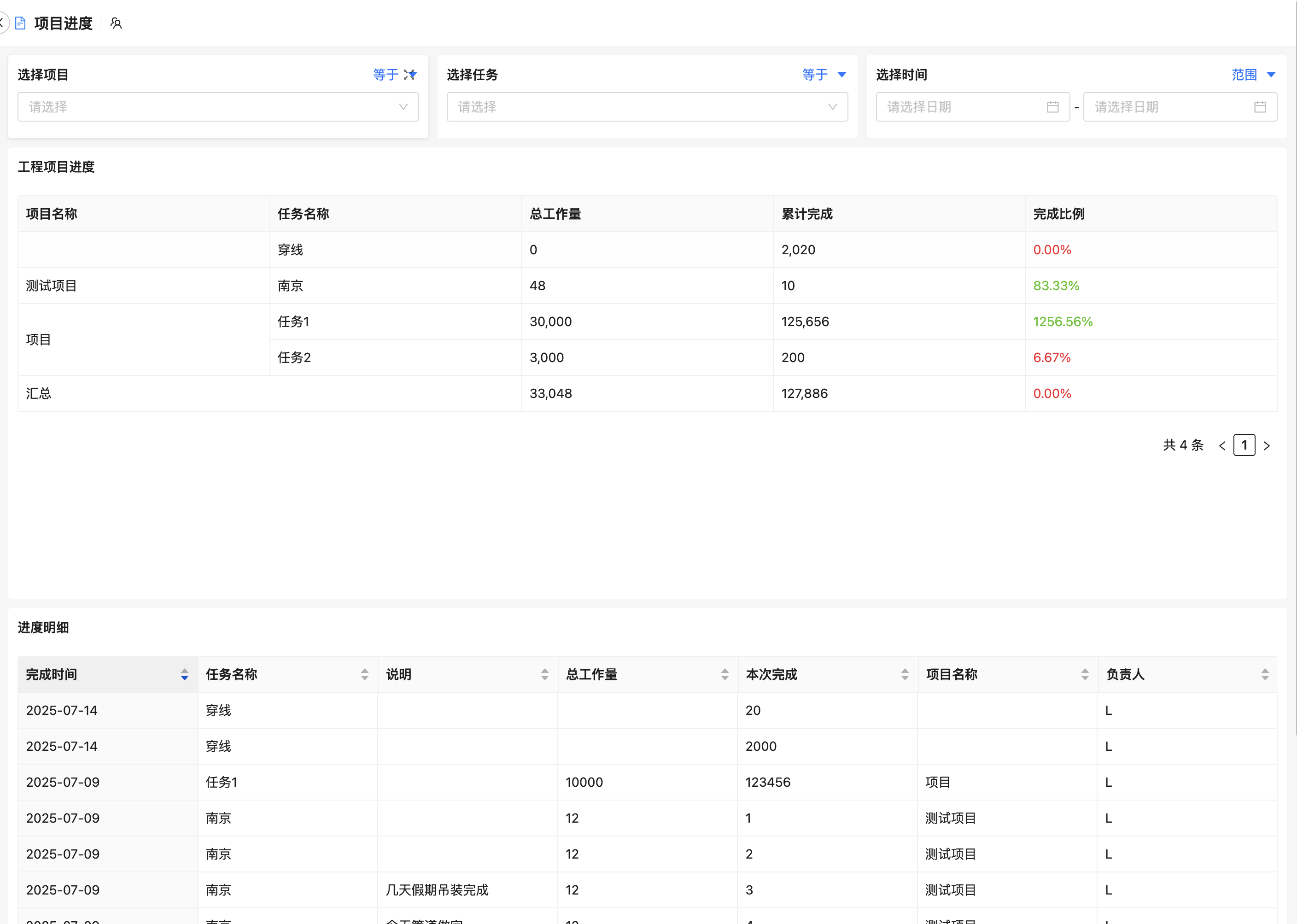
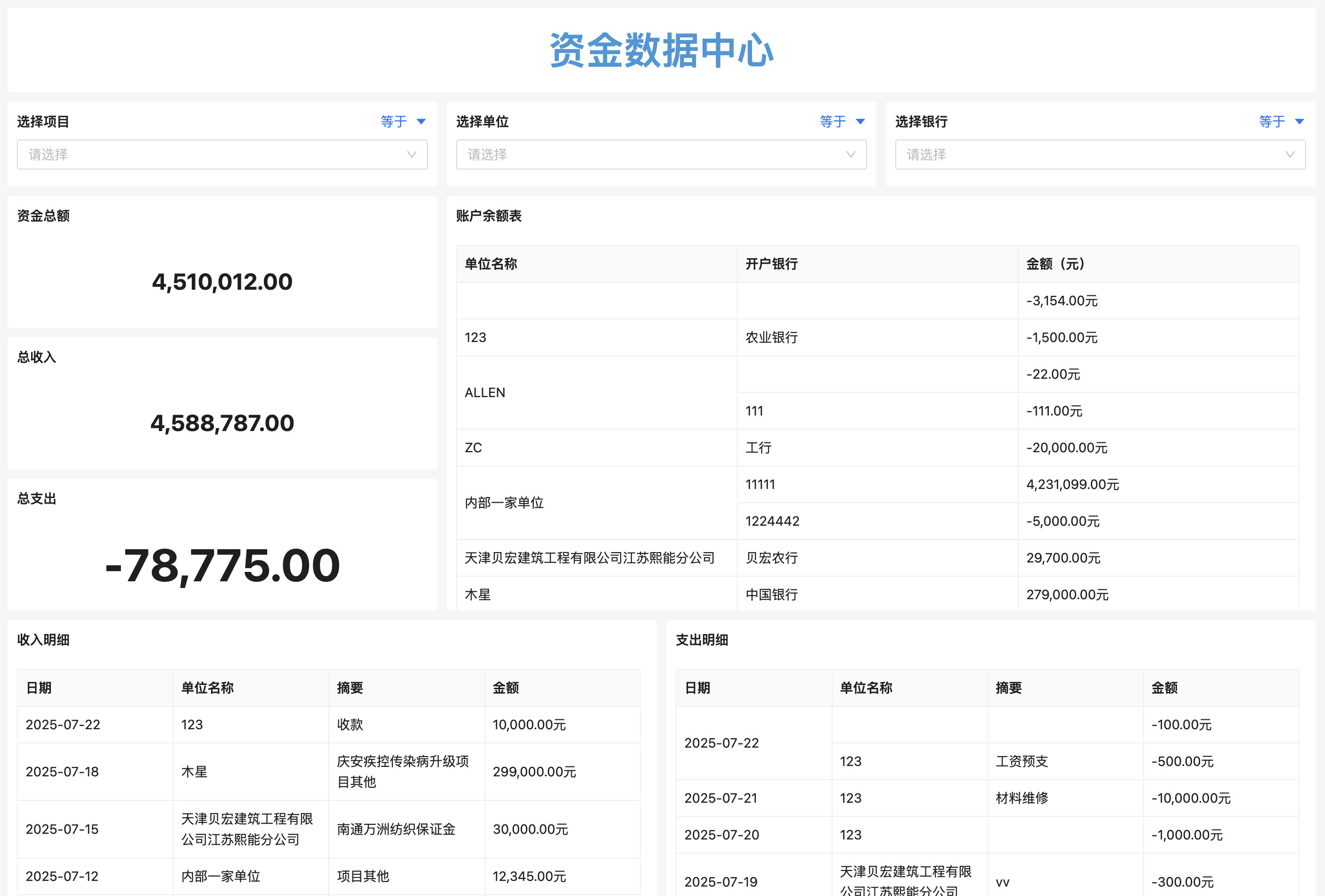
- 增强协同性:支持BIM(建筑信息模型)集成,实现与项目进度、资源计划的联动;
- 支持AI训练:为深度学习算法提供结构化数据集,用于路径规划、障碍识别等模块训练。
二、核心功能模块解析:打造完整的施工机器人数字孪生体系
一个成熟的施工机器人模型制作软件应包含以下关键模块:
1. 多源数据融合建模引擎
该引擎负责整合来自CAD图纸、激光扫描点云、无人机航拍影像等多种来源的数据,生成高精度三维几何模型。例如,使用AutoCAD或Revit导出的施工图纸可作为基础骨架,再结合LiDAR扫描获取的实际场地地形数据,构建逼真的虚拟施工现场。
2. 物理仿真与动力学计算
内置物理引擎(如Bullet、PhysX或自研引擎)模拟机器人运动过程中的惯性、摩擦力、碰撞检测等力学特性。这对于评估机器人在复杂地形上的稳定性、抓取物体时的力矩控制至关重要。
3. 行为逻辑编程与可视化调试
采用类似ROS(Robot Operating System)的节点式编程界面,允许开发者拖拽组件定义任务流程(如“搬运材料→到达指定位置→放置→返回”)。同时提供实时动画回放功能,便于发现逻辑漏洞。
4. BIM集成接口
与主流BIM平台(如Autodesk Revit、Tekla Structures)无缝对接,将施工机器人模型嵌入到整体项目模型中,实现与楼层划分、构件编号、施工顺序的同步更新。这不仅提升了可视化效果,也为后续的施工排程优化提供了依据。
5. AI训练沙盒环境
提供模拟摄像头、雷达、IMU传感器输出的数据流,支持开发者训练视觉识别模型(如目标检测、语义分割)、路径规划算法(A*、RRT*)等。尤其适合用于训练机器人在光照变化、遮挡、动态障碍物场景下的鲁棒性。
三、典型应用场景:从设计到落地的全流程闭环
让我们以外墙喷涂机器人为例,说明施工机器人模型制作软件如何贯穿整个项目生命周期:
1. 设计阶段:参数化建模 + 运动学仿真
工程师根据施工图纸输入墙体尺寸、高度、角度等参数,软件自动生成机器人本体结构(含机械臂、喷头、底盘),并通过DH参数法建立正逆运动学模型。随后运行仿真,检查是否存在干涉(如机械臂与吊篮碰撞),并调整关节限位。
2. 测试阶段:虚拟试运行 + 故障注入
导入实际工地视频或点云数据,创建“虚拟工地”,让机器人执行喷涂任务。系统可人为设置故障(如电源中断、传感器失灵),观察机器人是否能自动切换至备用模式或发出警报。
3. 部署阶段:与现场控制系统对接
将最终确认的模型导出为URDF(统一机器人描述格式)或SDF(Simulation Description Format),供实际机器人控制器加载。同时,通过API接口接入工地物联网平台,实现远程监控与状态反馈。
四、技术挑战与未来趋势
尽管施工机器人模型制作软件已取得显著进展,但仍面临几个关键挑战:
1. 模型精度与实时性的平衡
过于精细的模型会导致计算负载过高,影响仿真速度;反之,简化模型可能忽略重要细节。解决方案是采用分层建模策略:基础模型轻量化用于实时交互,高级模型用于离线分析。
2. 动态环境建模能力不足
现有软件大多基于静态场景,难以应对施工现场频繁变动(如临时堆料、人员穿行)。未来需引入增量式地图更新机制,结合SLAM(同步定位与建图)技术,实现动态适应。
3. 跨平台兼容性问题
不同厂商的机器人硬件接口不统一,导致模型迁移困难。行业亟需制定开放标准(如ROS 2生态扩展),推动模型标准化共享。
4. AI驱动的自动化建模
未来的方向将是“智能建模”:利用生成式AI(如扩散模型)根据文本描述自动创建初步模型,再由用户微调。这将极大降低建模门槛,使非专业人员也能快速上手。
五、推荐工具与实践建议
目前市场上已有部分成熟工具可供参考:
- Unity + ROS Integration:适用于游戏化交互和大规模场景渲染,适合教学演示和初步测试;
- Gazebo + MoveIt!:开源且功能强大,适合科研机构和高校实验室使用;
- Simulink + Robotics System Toolbox:MATLAB生态下集成度高,适合控制系统开发;
- 国产工具(如广联达BIM+机器人模块):贴合国内建筑规范,更适合本土化项目落地。
对于企业而言,建议采取“小步快跑”的策略:
- 先用低成本工具搭建最小可行模型(MVP);
- 逐步加入BIM集成、AI训练等功能;
- 定期收集一线反馈,优化用户体验;
- 建立内部知识库,沉淀典型场景模板。
总之,施工机器人模型制作软件不仅是技术工具,更是推动建筑行业数字化转型的核心基础设施。掌握这一技能,意味着掌握了未来工地的“指挥中枢”。