施工机械远程控制软件如何实现高效、安全的远程操作与管理
随着建筑行业数字化转型的加速,施工机械远程控制软件已成为提升工程效率、保障作业安全的重要工具。这类软件通过集成物联网(IoT)、云计算、5G通信和人工智能技术,使操作人员能够在远离施工现场的位置,对挖掘机、起重机、混凝土泵车等重型设备进行精准操控和实时监控。那么,施工机械远程控制软件究竟是如何实现的?它在实际应用中有哪些关键技术与挑战?本文将深入探讨其架构设计、核心功能模块、实施路径以及未来发展趋势。
一、施工机械远程控制软件的核心价值
传统施工机械依赖现场操作员直接驾驶或手动控制,存在诸多局限:一是作业环境恶劣(如高空、高温、粉尘),对操作人员健康构成威胁;二是受限于地理因素,大型项目可能因人力调配困难导致停工;三是缺乏统一调度和数据采集能力,难以实现精细化管理。远程控制软件的出现,正解决了这些痛点:
- 提升安全性:减少人员暴露于危险区域的风险,尤其适用于高危作业场景,如爆破拆除、深基坑挖掘等。
- 增强灵活性:支持多终端接入(PC、平板、VR头盔),操作员可在办公室、指挥中心甚至异地完成作业。
- 优化资源配置:结合GIS地图和设备状态数据,实现智能调度与维护预测,降低空载率与故障率。
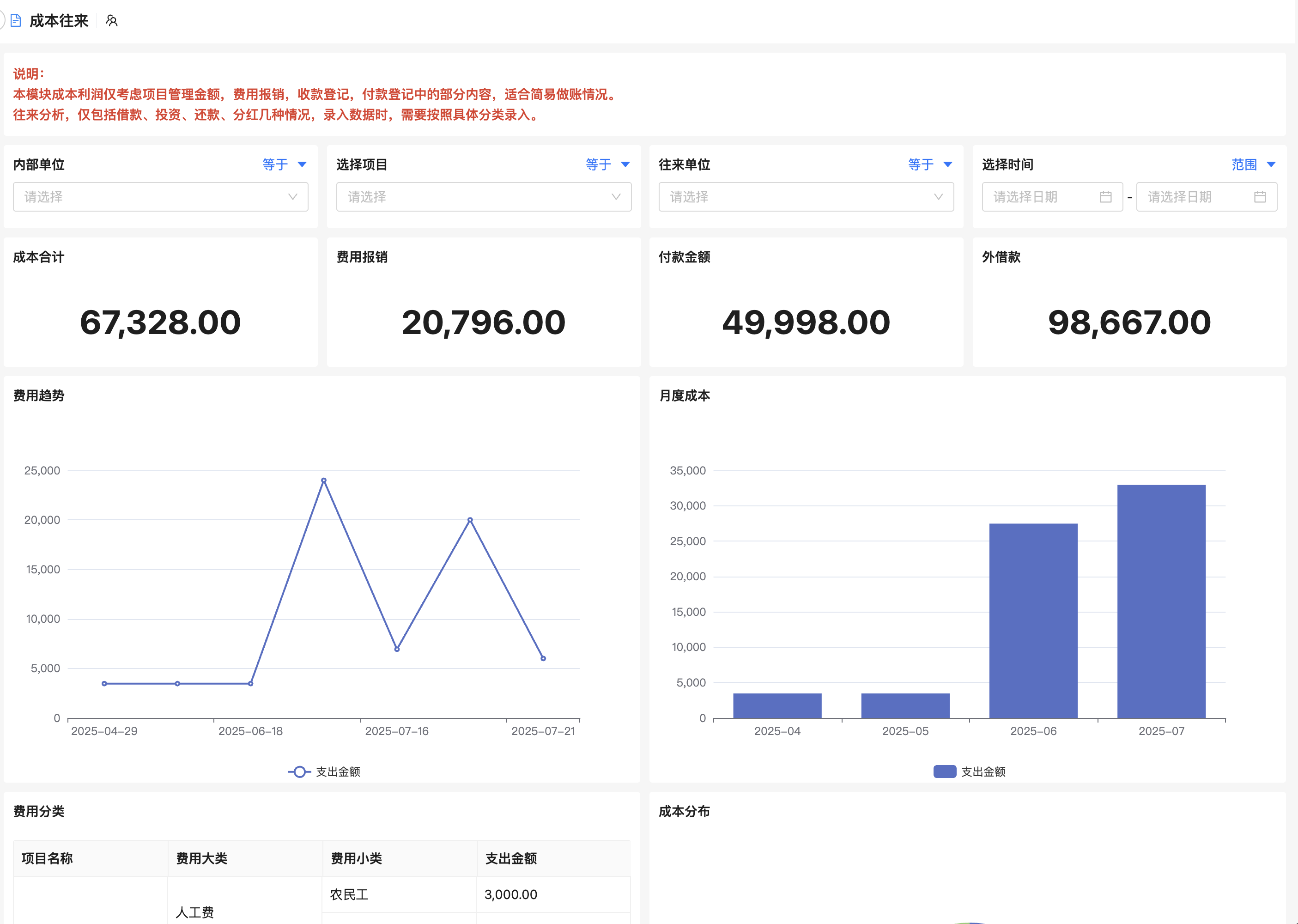
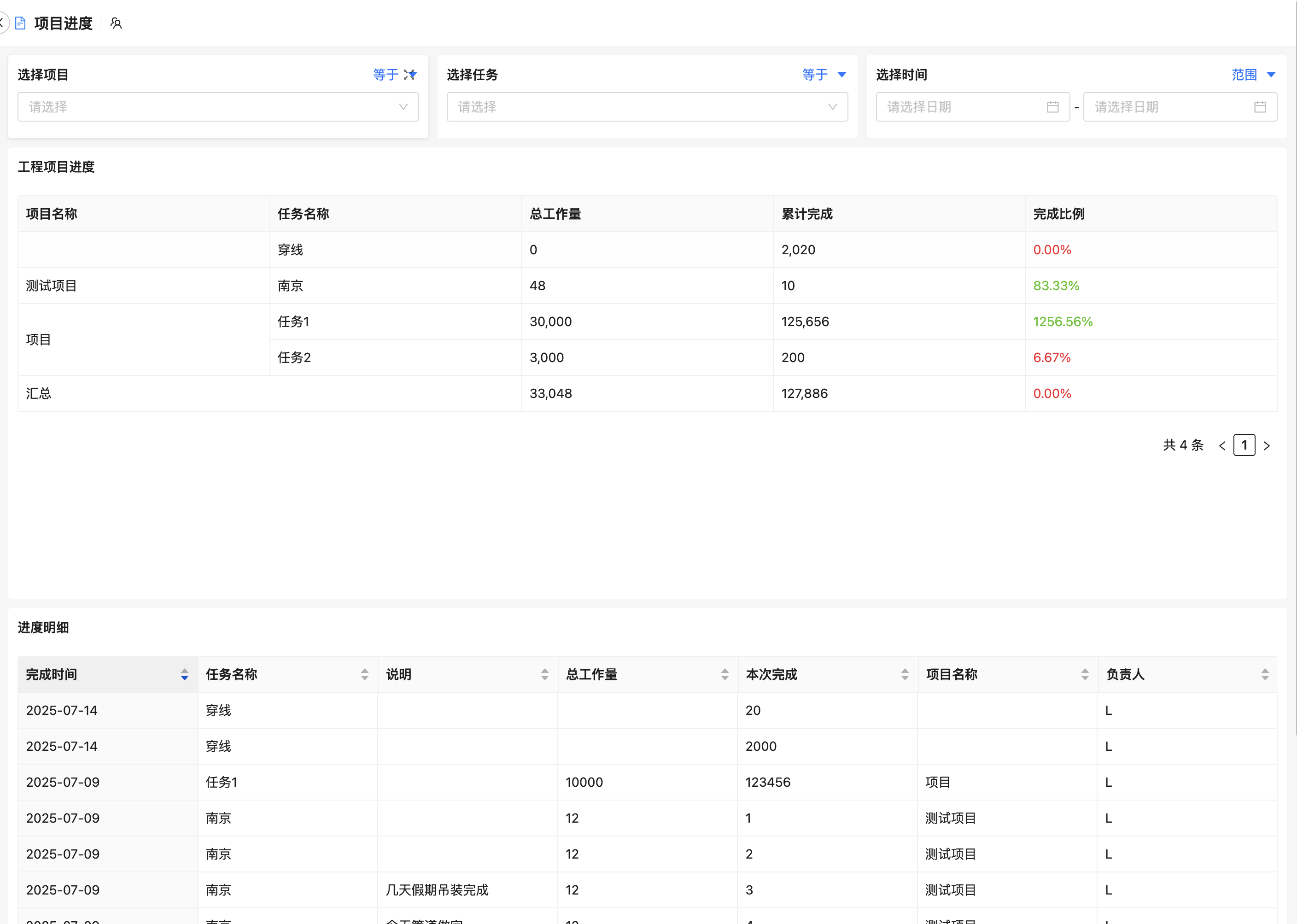
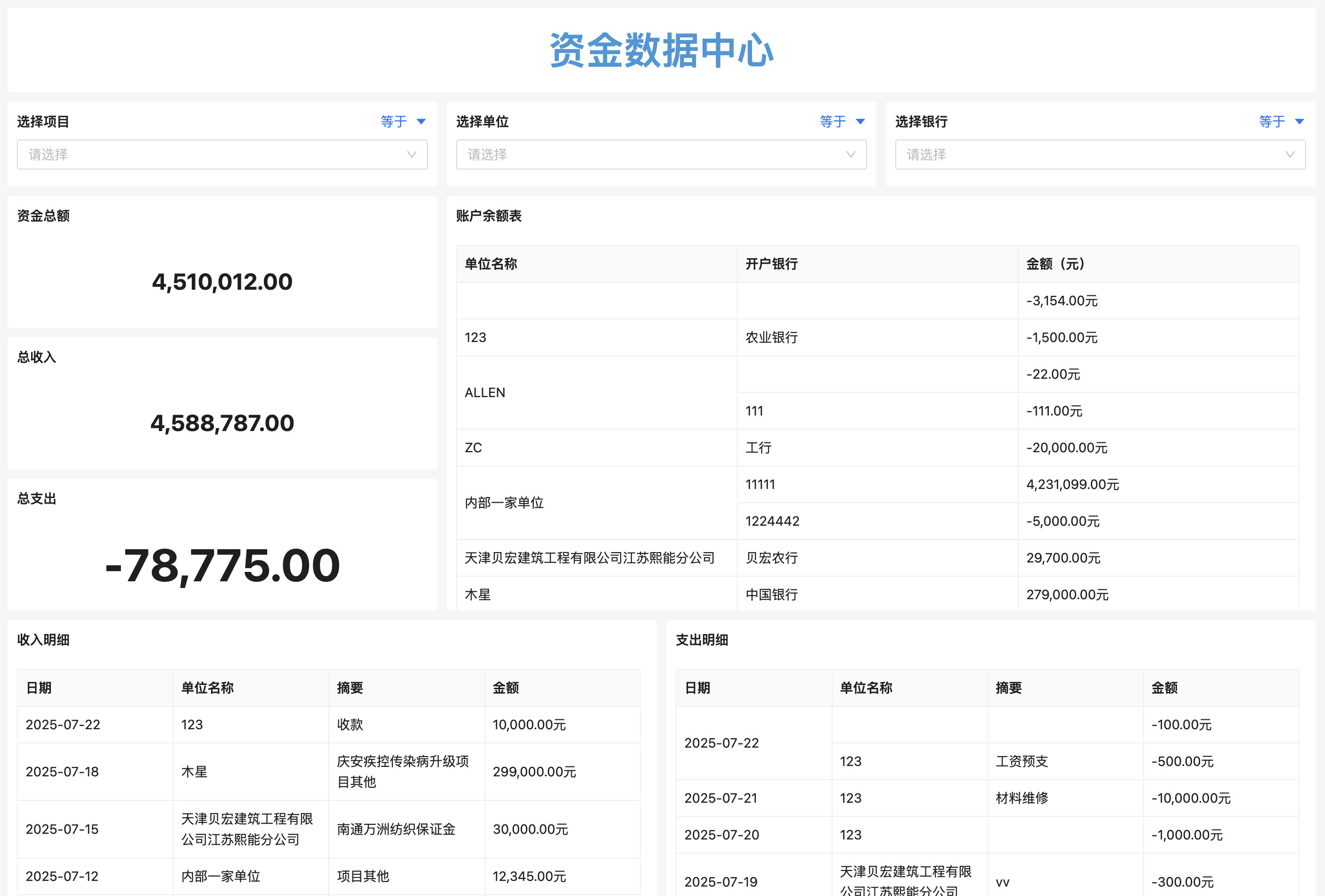
- 强化数据驱动决策:记录每台设备的操作日志、能耗曲线、工况参数,为成本核算与绩效评估提供依据。
二、关键技术架构解析
一个成熟的施工机械远程控制软件通常包含以下五大技术模块:
1. 硬件层:传感器与执行器集成
机械设备需加装多种传感器(如陀螺仪、GPS、压力传感器、温度传感器)以获取实时状态信息,并配备高精度伺服电机或液压控制系统用于接收指令并执行动作。例如,在挖掘机上安装六轴力反馈装置,可让远程操作者感受到“触觉”反馈,从而更精确地控制铲斗力度。
2. 通信层:低延迟、高可靠传输协议
远程控制对网络延迟极为敏感,一般要求端到端延迟低于50毫秒。因此,推荐使用5G NR(新空口)或工业级Wi-Fi 6作为主干网络,辅以边缘计算节点部署在工地附近,减少云端处理时间。同时,采用WebRTC或MQTT over TLS加密传输视频流与控制指令,确保数据不被篡改。
3. 控制平台:云原生架构与微服务设计
后端系统应基于容器化技术(如Docker + Kubernetes)构建,便于弹性扩展与故障隔离。典型的服务包括:
- 设备注册与认证服务(OAuth2.0 + JWT)
- 实时视频流服务(RTMP/HLS推拉流)
- 控制指令下发服务(RESTful API + WebSocket)
- 日志与告警服务(ELK Stack 或 Grafana Loki)
4. 用户界面:沉浸式交互体验
前端可开发响应式网页应用(React/Vue.js),也可针对特定场景推出VR/AR版本。比如,使用HTC Vive或Meta Quest 3连接远程控制器,模拟真实操作手感,配合360°全景摄像头画面,极大提升操作沉浸感。此外,界面需支持多语言切换、手势识别、语音指令等功能,适应不同地区操作员习惯。
5. 安全机制:多层次防护体系
远程控制系统一旦被入侵,可能导致设备失控甚至安全事故。必须建立多重安全防线:
- 网络层:防火墙规则限制访问IP范围,启用DDoS防护
- 应用层:API接口权限分级(如普通操作员 vs 工程师)
- 数据层:敏感信息加密存储(AES-256),定期审计日志
- 物理层:设备本地设置紧急停止按钮(E-stop),断网自动回退至本地模式
三、典型应用场景与案例分析
以下是几个成功落地的远程控制软件应用实例:
案例1:某地铁隧道掘进项目(北京)
该项目采用远程控制盾构机软件,由北京总部工程师远程操控位于地下15米深处的设备。通过部署5G基站+边缘服务器,实现了毫米级定位精度与毫秒级响应速度。结果表明,单台盾构机每日掘进进度提升约18%,且未发生任何安全事故。
案例2:海外港口起重机自动化改造(迪拜)
当地一家物流公司引入远程控制软件,将原有司机操作改为集中式遥控中心统一管理。每位操作员负责3-5台起重机,利用AI辅助判断吊具位置与货物稳定性,避免碰撞风险。运营效率提高25%,人工成本下降30%。
案例3:山区桥梁施工(四川)
面对复杂地形与恶劣天气,施工单位部署了带有热成像与夜视功能的远程控制塔吊系统。即使夜间或浓雾环境下也能稳定作业,有效保障了工期进度。
四、实施步骤与注意事项
要顺利推进施工机械远程控制软件的落地,建议按以下流程分阶段实施:
- 需求调研与可行性评估:明确目标设备类型、控制距离、预期效果,评估现有基础设施是否满足条件。
- 硬件改造与部署:选型合适的传感器与通信模块,安排专业团队进行设备加装与调试。
- 软件定制开发:若无成熟产品,可委托专业软件公司开发私有化部署版本,优先考虑开放API接口,方便后期扩展。
- 测试验证:在模拟环境中反复演练,检查网络抖动、延迟突增等情况下的容错能力。
- 培训与上线:组织操作员进行实操培训,制定标准化作业流程(SOP),逐步替换传统操作方式。
特别提醒:初期不宜大规模推广,建议选择1-2台设备先行试点,积累经验后再全面铺开。
五、未来发展趋势
随着技术进步,施工机械远程控制软件将呈现三大趋势:
- 智能化升级:融合AI视觉识别技术(如YOLOv8),自动识别障碍物、人员活动区域,实现避障与自主规划路径。
- 数字孪生融合:构建设备数字孪生体,将物理世界中的运行状态同步映射到虚拟空间,便于远程诊断与仿真训练。
- 人机协同进化:从“远程遥控”走向“辅助决策”,即系统根据历史数据和当前工况给出最优操作建议,人类只负责最终确认,形成真正的“人机共生”模式。
总之,施工机械远程控制软件不仅是技术革新,更是管理模式的变革。它正在重塑建筑行业的生产方式,推动整个行业向绿色、智能、安全的方向迈进。对于企业而言,尽早布局这一领域,将在未来的竞争中占据先机。